LEGO Robot Arm System
-
Course: Introduction to Robotics, Department of Mechanics, National Taiwan Univeristy
Date: Oct. 2012 - Jan. 2013
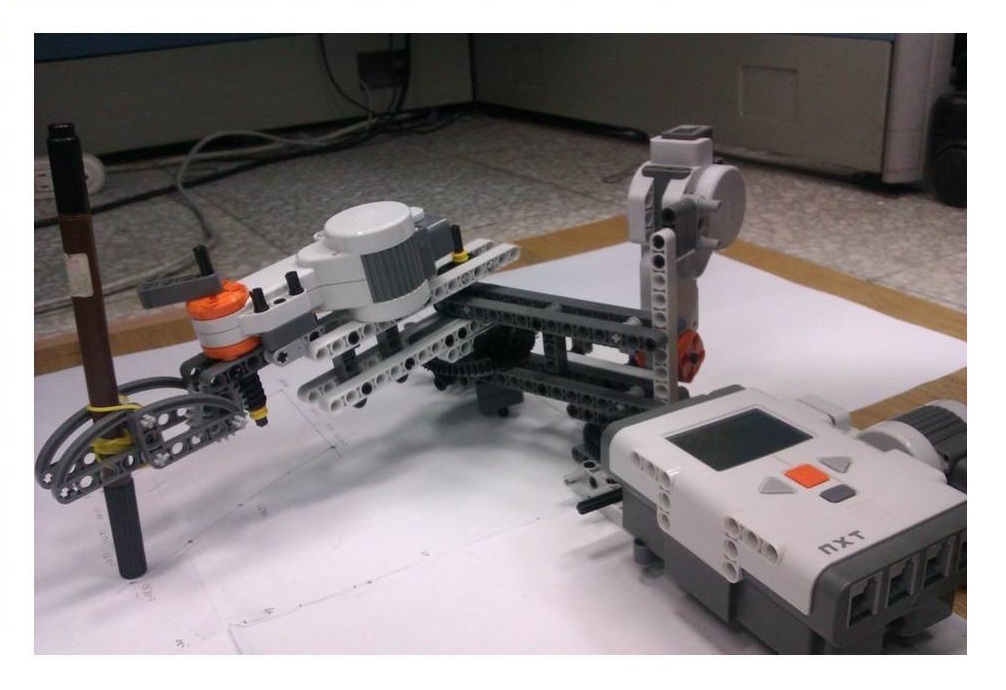
We developed a self-built LEGO robot arm with three joints, designed specifically for writing applications. Collaborating with two Mechanical Engineering students, we built the robot entirely from scratch. My role focused on formulating the path equation for inverse kinematics and programming the robot using NXT language. One significant challenge we encountered was the inconsistency in gear operation after disassembling and reassembling the arm, which affected its accuracy. To address this issue, we conducted experiments and introduced additional control points to improve precision and stability.
The first draft of anything is shit. ― Ernest Hemingway