RoboCup Standard Platform League
-
Advised by: Prof. Chieh-Chih (Bob) Wang
Date: Sep. 2012 - June 2013
In the RoboCup Standard Platform League (SPL), all teams use identical humanoid Nao robots. This standardization allows teams to focus exclusively on software development rather than robot hardware. During the competition, the robots operate fully autonomously, with no remote control or external intervention by humans or computers.

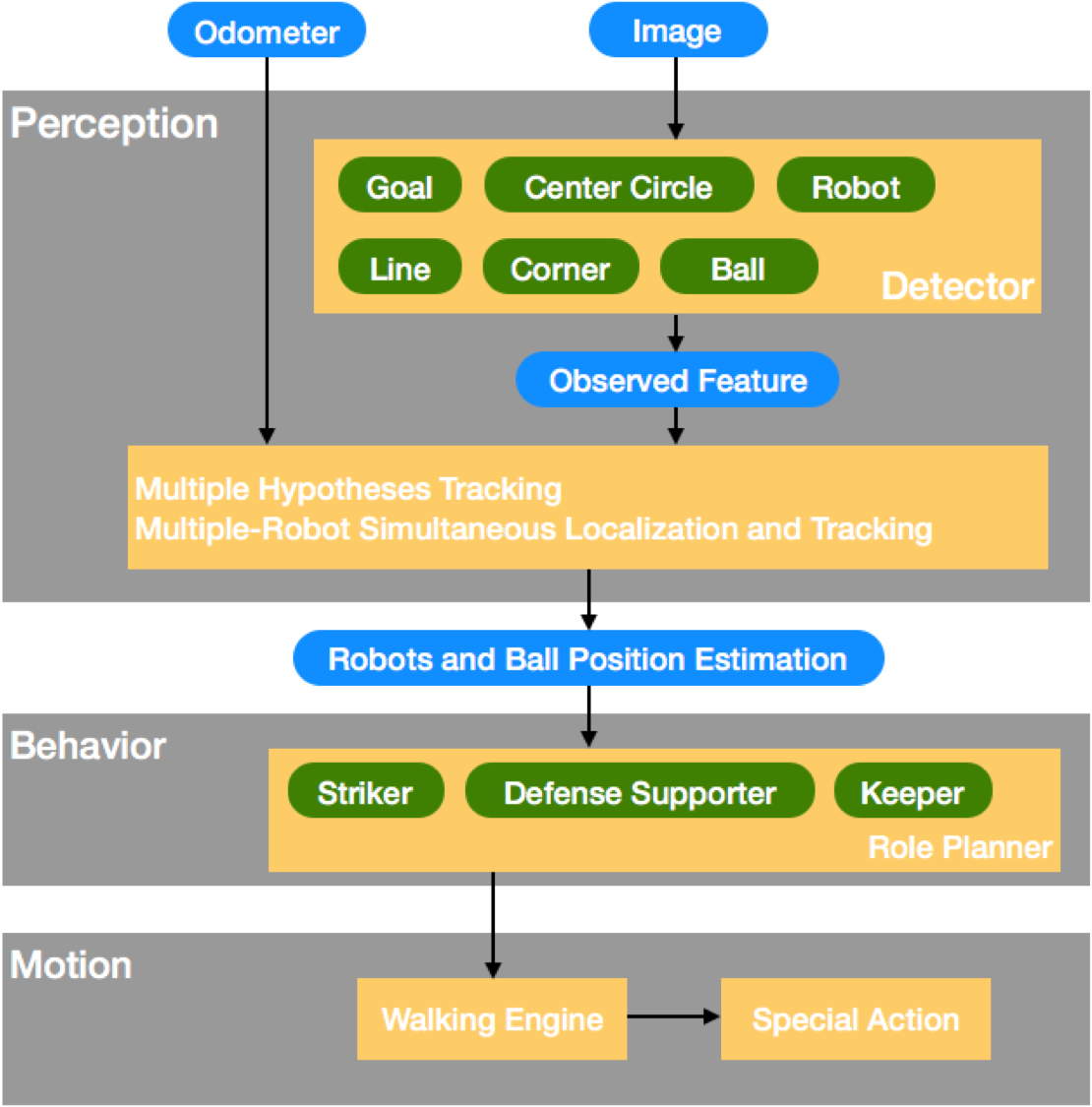
Our RoboCup system is composed of three main components: perception, behavior, and motion. A pipeline figure can effectively illustrate the system’s structure and functionality. Below is a brief scenario demonstrating how the pipeline operates.
Suppose there are two robots on a soccer field. Once activated, the robots use field detectors (goal, center circle, corner, and line detectors) to localize themselves based on static features. Simultaneously, they utilize ball and robot detectors to track these dynamic objects. These features are then integrated into a feature vector, which, when combined with odometer readings, feeds into our multiple hypotheses tracking and multi-robot simultaneous localization and tracking (SLAM) modules to estimate the positions of the robots, their teammates, and the ball.
Since the robots operate in a distributed manner, they share their estimations with one another and fuse the received data to achieve a more accurate understanding of the field. Based on these perception results, the robot closer to the ball transitions into the role of a striker, while the other assumes the role of a defensive supporter. A filtering mechanism is applied to prevent state oscillations during role assignments.
Once roles are determined and planned positions are computed, the motion module activates, directing the robots to their respective targets—either the ball or a defensive position—enabling them to kick or block the ball as required.
When multiple robots are on the field, role oscillation can become an issue. To mitigate this, we implemented stricter rules for defensive roles and more flexible rules for strikers. This design has significantly reduced abnormal switching and improved overall performance.
- Isaac Asimov, Runaround